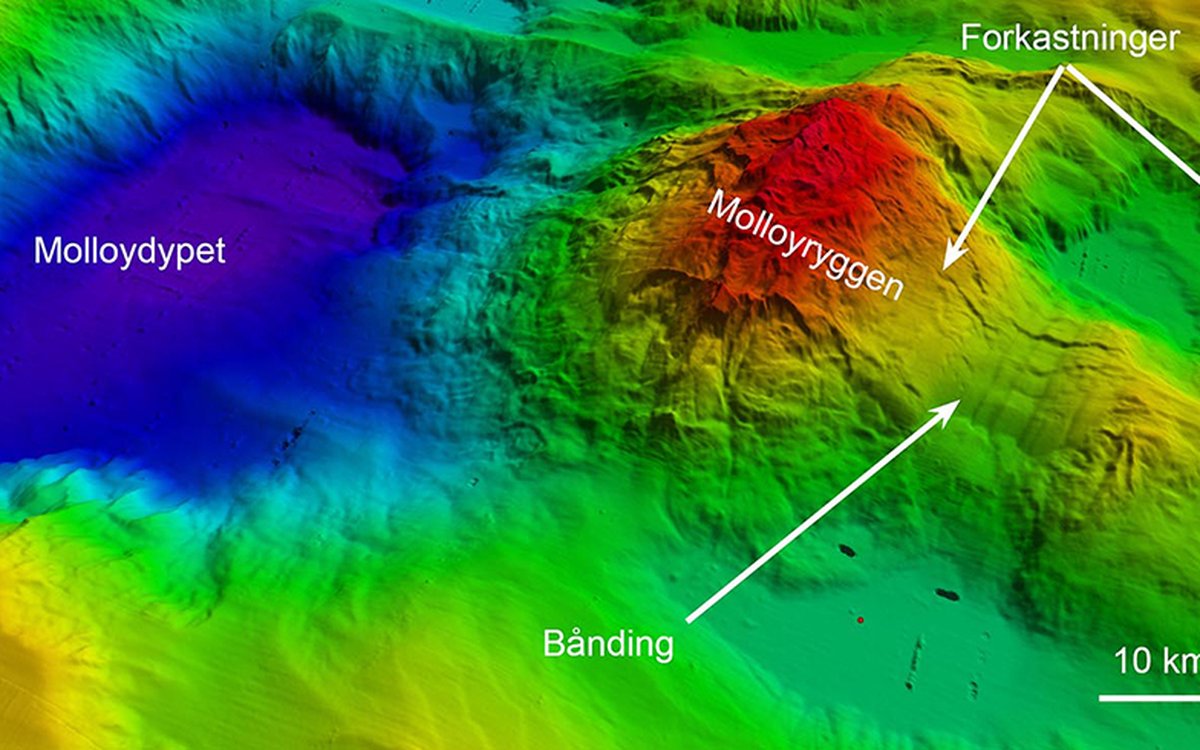
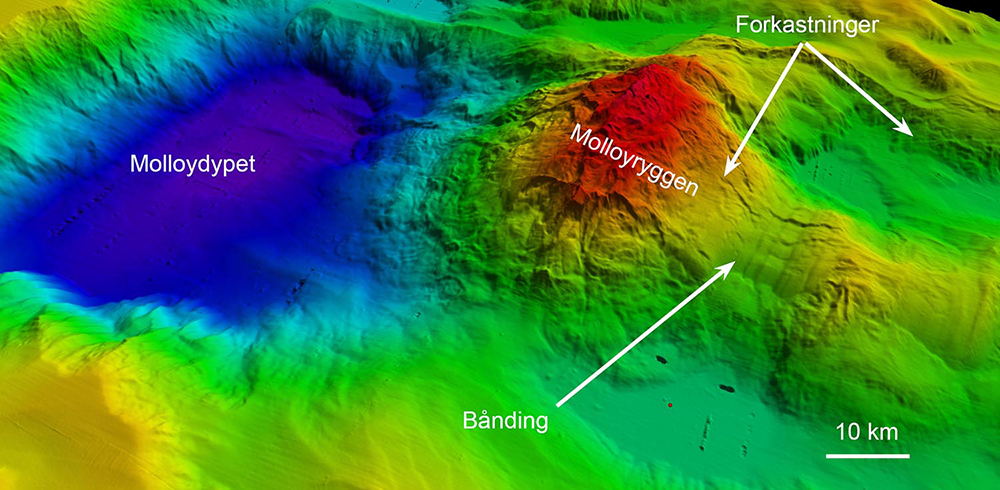
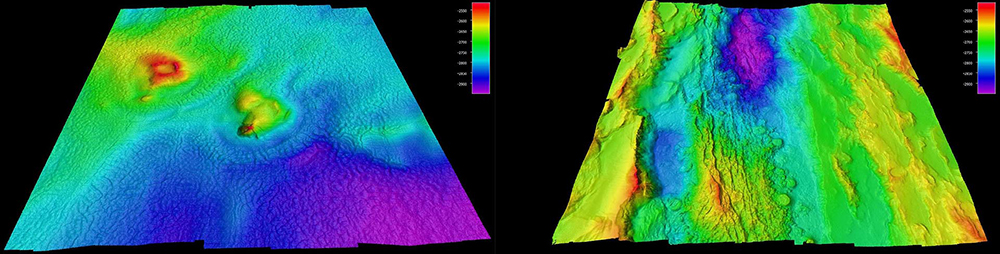
Skyggerelieffbilde som viser 3D-modell fra Molloydypet og Molloyryggen, med marine gjel, utrasninger, forkastninger og bånding.
Skyggerelieffbilde som viser 3D-modell fra Molloydypet og Molloyryggen, med marine gjel, utrasninger, forkastninger og bånding.
Publisert: 20.10.2021
Nå har Mareano startet opp en regional kartlegging av havbunnen i dyphavet.
Dyphavsområdene har særpregede miljøforhold; naturtypene og økosystemene vi støter på er til dels lite kjente. Målet med Mareanos kartlegging er derfor å skaffe en regional oversikt over naturtyper og økosystemer i hele Norskehavet. Havområdet dekker et areal på mer enn én million kvadratkilometer, mer enn tre ganger Norges totale landareal.
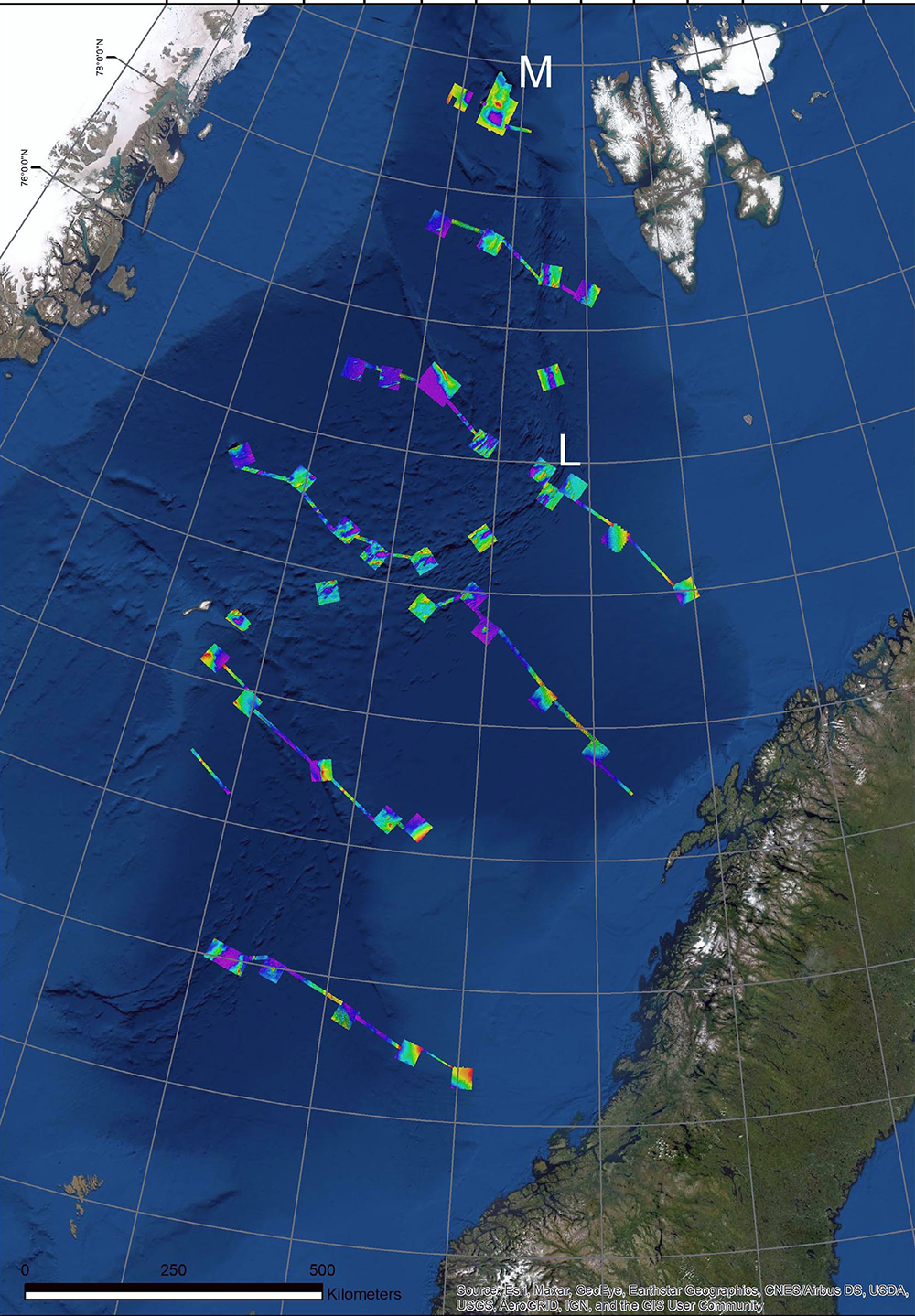
Første fase besto av dybdekartlegging med multistråle-ekkolodd av cirka 40 delområder med forbindelseslinjer – totalt cirka 64 000 km2 – i 2019. Samtidig ble det samlet inn backscatterdata, som gir informasjon om bunntyper, vannkolonnedata, som gir mulighet for å påvise gasslekkasjer, og sedimentekkolodd-data, som gir informasjon om strukturer i de øverste sedimentlagene.
Plasseringen av delområdene ble gjort utfra kjennskap til dybde, geologi, biologi og oseanografi, for å gi et mest mulig representativt tverrsnitt av områdene dypere enn 500-600 meter – altså kontinentalskråningen, dyphavslettene og den midt-atlantiske fjellryggen.
Samlet sett skal kartleggingen gi nok informasjon om dyphavet til å tilfredsstille viktige deler av forvaltningsplanens kunnskapsbehov. Etter hvert vil resultatene fra Mareano gi et verdifullt kunnskapsgrunnlag som kan benyttes inn i vurderinger av nye «særlige verdifulle og sårbare områder» (SVO) til både forvaltningsplanene og i utvelgelsen av truede naturområder for framtidig vern eller beskyttelse i den marine verneplanen.
At Jotunheimen er flat kan oppfattes som en drøy påstand, men nye analyser som sammenlikner terrenget i dyphavet med fastlands-Norge viser nettopp det. Høydeforskjellen er mer ekstrem ved midthavsryggen enn det vi finner på fastlands-Norge.
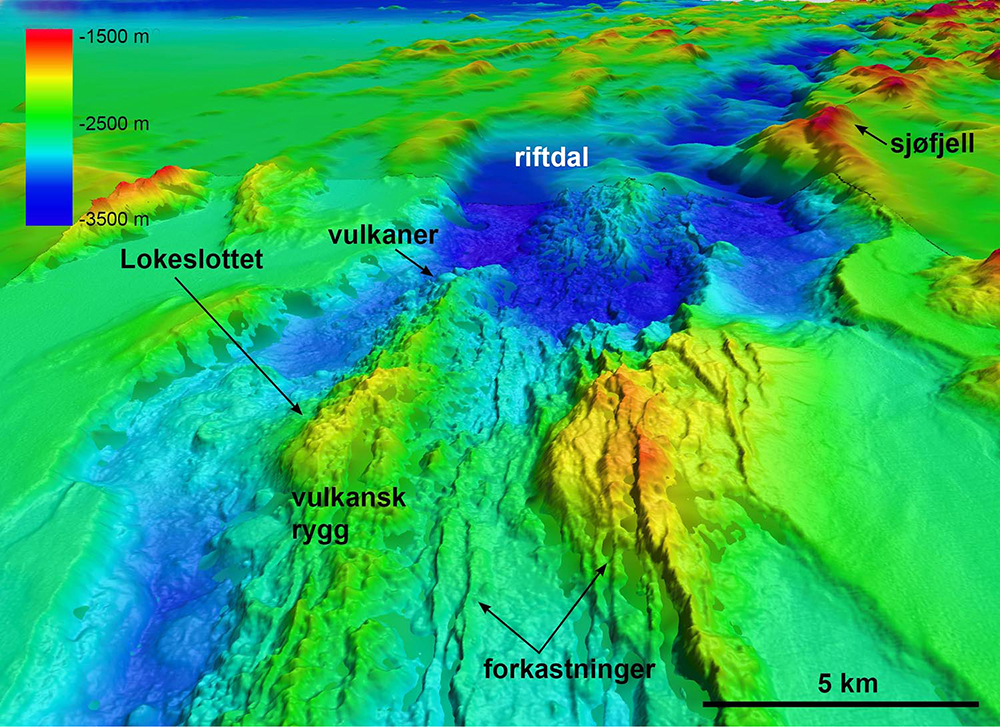
Ett eksempel er Lokeslottet som ligger på en vulkansk rygg, i en riftdal på midthavsryggen. Over en strekning på 25 kilometer stiger terrenget 2735 meter fra riftdalen til sjøfjellene på vestsiden. Ved å se på høydeforskjeller innenfor et vindu på én kvadratkilometer, finner vi at høydeforskjellen ved Jotunheimen er opptil 740 meter, mens den er opptil 1200 meter ved Lokeslottet. Studier utført av Senter for dyphavsforskning ved Universitetet i Bergen (UiB) har vist at det ved Lokeslottet finnes mange svært varme kilder som spyr ut opptil 320 grader varmt vann, og danner metallforekomster med kobber, sink, bly og sølv.

Et annet område med ekstreme dybdeforskjeller er Molloydypet, som ligger vest for Svalbard. Dette er Norges dypeste punkt – 5569 meter dypt! Molloydypet og den tilhørende Molloyryggen ble dannet for 30-40 millioner år siden. I hovedsak går bevegelsen i havbunnen i den midt-atlantiske ryggen vinkelrett på ryggen. Men det er ikke tilfellet der hvor ryggen svinger, slik som i Framstredet. I slike svinger vil det også bli sidelengs bevegelser mellom forkastningssoner i havbunnen, noe som kan føre til store forsenkninger slik som Molloydypet.
Geologien i området er svært variert. Langs kantene av Molloydypet ser vi utrasinger og små marine gjel, canyoner. Nord for det dypeste området ligger Molloyryggen, et undersjøisk fjell som reiser seg mer enn 4000 meter fra Molloydypet, på mindre enn 20 kilometer. Overflaten er til dels meget kupert, og noen steder ser vi en tydelig bånding i fjellet som kan være resultat av at fjellmasser har beveget seg relativt til hverandre. Dette er sannsynligvis et såkalt «core complex», hvor dypbergarter er brakt opp til havbunnen av tektoniske prosesser. Vi ser også mange forkastninger med bevegelser på opptil 1000 meter.
Mareano har så langt hovedsakelig kartlagt på kontinentalsokkelen ned til 400-500 meters dyp. Derfor har det vært praktisk å basere kartleggingen på overflatefartøy – både for innsamling av dybdedata, video, og fysiske prøver som grabb, trål, slede og kjerneprøvetaking. På de store dypene i Norskehavet er det bruk for andre plattformer og sensorer.
Derfor ser vi på bruk av plattformer som ROV (Remotely Operated Vehicle), AUV (Autonomous Underwater Vehicle) eller VAMS (Video Assisted Multi Sampler), som kan utstyres med forskjellige sensorer og delvis kan ta prøver (ROV, VAMS). ROV-er er velkjent for mange fra oljeindustrien – dette er fjernstyrte mini-ubåter som er forbundet med kabel opp til moderskipet, og som kan utstyres med for eksempel multistråle-ekkolodd, videokameraer og gripearmer som kan utføre operasjoner eller ta prøver.
Den store og vel utstyrte ROV-en «Ægir6000», som opereres av NORMAR (Norwegian Marine Robotics Laboratory) ved Universitetet i Bergen er en aktuell kandidat for Mareanos kartlegging. Den er rikt utstyrt med kameraer, prøvetakingsutstyr, multistråle-ekkolodd og andre sensorer, som for eksempel gass-sniffere, og vil være vel egnet for Mareanos behov med hensyn til video/foto og prøvetaking. AUV-er er selvgående farkoster uten kabel. De kan programmeres til å dykke ned til et bestemt dyp over havbunnen, og deretter gå forutbestemte linjer. For Mareano vil det være meget nyttig å først fly cirka 100 meter over havbunnen, og bruke en kombinasjon av syntetisk aperture sonar (SAS) og multistråle-ekkolodd, som kan gi et meget detaljert bilde av havbunnen – både med hensyn til terrengformer, og hardhet. Deretter kan vi få AUV-en til å «fly» cirka 5 meter over havbunnen og ta bilder av havbunnen for å dokumentere geologi og biologi, samtidig som en gass-sniffer og andre sensorer registrerer om det er noe unormalt i vannsøylen. VAMS-en består av en «hangar» med utstyr for å ta 5-6 grabber, og en liten ROV med videokamera som kan sendes ut opptil 100 meter fra hangaren.
For Mareano vil det neppe være enten eller, men snarere både og når det gjelder plattformer. Grunnen til dette er det utfordrende terrenget som finnes mange steder. 3D-modellene som er vist i figur 5 kan illustrere dette. Venstre figur er fra dyphavssletten som er stort sett temmelig flat, bortsett fra to «vulkanlignende» strukturer i senteret. Her kan vi bruke AUV både til å lage et detaljert bilde av havbunnen, og til å ta bilder, og ROV eller VAMS til å ta prøver, og video. Høyre figur er fra midthavsryggen og den såkalte Lokeskatten. Her kan vi sannsynligvis bruke AUV til å fly 100 meter over havbunnen for å tegne et detaljert bilde langs forsenkningene, men det er utelukket å bruke AUV til å gå på tvers av ryggene, eller nær havbunnen for å ta bilder. Her vil det være ROV eller VAMS som er gode verktøy, både for video og prøvetaking.
Høsten 2021 fullføres «desktop»-studien vi gjør for å velge egnet metodikk og strategi, og i løpet av 2022 er planen å teste ut utvalgte deler av teknologien, og etablere egnede arbeidsprosesser. Når vi for eksempel samler inn multistråledata og SAS-data med AUV, vil det være nødvendig å prosessere og tolke disse raskt, slikt at de kan brukes i videre planlegging av neste dykk. Det blir fort store mengder med data som skal håndteres, og vi må også vurdere om vi skal ha personell om bord som tolker dataene, eller om vi etablerer en «landbase» som får overført prosesserte data, gjør en førstehånds tolkning, og sender forslag til nye undersøkelser tilbake til skipet.
Første ordinære dyphavskartlegging er foreslått å starte opp i 2023, men dette vil være avhengig av tilgjengelige budsjettmidler, og prioritering i forhold til andre presserende oppgaver, som for eksempel kartlegging i Nordsjøen, som er relevant for havvind.




